三菱自動車のテクニカルレビューは毎年発行されていて、ホームページからもPDF版をダウンロードして読むことが出来ます2010年で終刊しています。ランエボ関係について掲載されている記事について、ランエボの走らせ方のヒントになりそうなことを考察してみました。
2001年
「高性能4WD車用アクティブセンターデフの開発」 p.77-82
【ACD】横滑り角がアウト向きだとフロント側の旋回半径が大きいため、センターデフを差動制限すると動力循環によりフロントには制動力が加わります。制動力の方向はフロントのコーナリングフォースと逆向きなので、前輪の旋回力が小さくなりアンダーステアにとなってしまいます。逆に見れば、車両姿勢(横滑り角)がイン向きだとフロント側のほうが旋回半径が小さいので、フロントタイヤの回転速度が低いので、センターデフの差動制限によりフロントは駆動力が加わることになります。
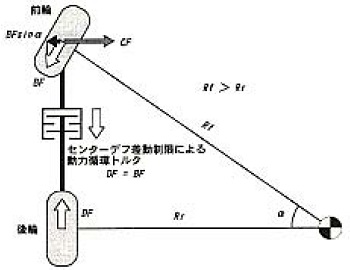
旋回初期では必ず横滑り角はアウト向きなので、ここで差動制限を掛けるとアンダーとなりますが、減速の為に制動をしている場合には安定方向になるため、路面状態に合わせた制御チューニングが必要です。路面のμが高ければ差動制限を小さめにして旋回性能を優先し、低ければ安定性を高めるように差動制限を大きめにするのです。しかし、路面のμ等の路面状態は刻々と変化するので、推定遅れを嫌って事前に3つのモードを設定しておきドライバーが選択することにしています(TARMAC,GRAVEL,SNOW)。ACDの利かせ方は、ステアと車速から基準車体姿勢(←横滑り角と推定されます)を算出し、4輪車速から実車体姿勢を算出してフィードバック制御をおこなっています。これは、横滑り角が大きすぎればACDを強める(アンダー化して安定性を高める)、小さすぎればACDを弱めてオーバー方向にするのです。
ACDは前後Gとアクセルでフィードフォワードもしていると書かれていますが、このフィードフォワードの内容を知りたいところです。まとめると、車両姿勢は少しイン気味にしてゼロカウンターの4輪ドリフトで立ち上がるのが駆動力を4輪をうまく使えて速いはず。あとは進入でしっかり旋回姿勢を作るのが大切で、アンダーを出さないようにするのが良さそうです。
2002年
「世界ラリー選手権用ワールドラリー車の開発」 p.95-97
【WRC】WRC用車両に関するものです。4駆は直結(ACDではない)でクラッチで前輪の駆動力を切り離せるようになっています。その他も市販車とは異なっていますが、興味があればレビューを見るのが良いです。
2003年
「スーパーAYCの開発」 p.75-78
【S-AYC】AYCの基本原理はスリップ結合されたクラッチは高回転側から低回転側にトルクを伝達する(回転数差をなくす方向に働く)ことを利用しています。スーパーAYCに改良するときに、左右で直接トルクをやり取りするように変更しています(旧AYCはデフケースにトルクを渡していました)。これにより、クラッチは旧AYCから変更無しで伝達トルクを大きく出来ています。
構造上の特徴としては、左右の増速ギア比の差により、左右輪の移動トルク量が左クラッチと右クラッチを使ったときで異なっています。左は2.22×Tcl、 右は1.82×Tcl(Tclはクラッチトルク)です。左右差はクラッチトルクを左右で変えることで吸収出来ます。左クラッチを作動させると左輪へトルクを移動します。
2004年
「ランサーエボリューションの運動性能向上のための軽量化技術開発」 p.82-87
【軽量化】アルミルーフで45%軽量化しています。ルーフとロールセンターからの距離はボンネットフードとロールセンターの距離の3倍なので、ロール慣性モーメントに対しては9倍の効果があります。これはランサーエボリューションXIII MRにおいては重心高を3mm下げ、ロール量1.3%の効果です。車体の曲げ、捻り剛性はスチールのルーフと同等としています。
「新車内通信システムの開発」 p.88-94
【CAN】CAN(Controller Area Network)の通信に関する紹介で、特に運動性能には関係がありません。
2005年
特にランエボ関係はありません。
2006年
「S-AWC(Super All Wheel Control)の核となる左右駆動力移動技術」 p.18-24
【S-AWC】速度線図を用いたAYCの効き方が解説されています。機構の紹介や原理、方式の比較などです。詳細はレビューを読んでください。
2007年
特にランエボ関係はありません。
2008年
この年はランエボXが発売になった関係で、「小特集 走る歓び」が設定されていて、盛りだくさんな内容です。
「座談会-『走る歓び』を支える運動性能向上技術-」 p.8-15
【開発話】運動性能向上技術や4WDシステム開発に携わる担当者が対談形式で思いを語っています。4WSやフロントアクティブステア、EPSといったランエボXには採用されていないシステムについての話なども載っています。いろいろな意味で面白い内容になっているので、一読すると良いと思います。
「各種駆動方式における左右トルク移動システムの車両運動性能向上」 p.16-22
【AYC】AYCでヨーモーメントを加えると、飽和しているほうのコーナリングフォースを反対側の輪に割り振りなおすことが出来ます。AWDの場合、フロント、リアの両方にAYCをつけると効果が大きいが現実的でないので、少ないトルクで大きな効果のあるリアにAYCをつけるのが良いと結論づけています。この部分については、私の「AYC Brake Controlの考察」も読んでいただきたいです。
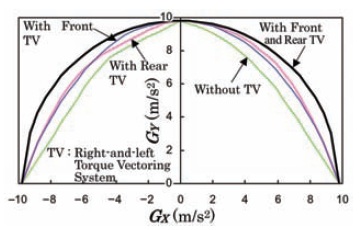
減速側の-4m/s2~0m/s2の小さい減速Gの辺りではフロントに付けたほうが大きい効果を得られているので、トータルで見てもフロントにトルク移動型のAYC機構をつけたほうが良いと思います。背反は、フロント側に重量物が移動するので重量配分が更にフロント寄りになってしまうと言うことです。
追加で考察してみると、リアタイヤのキャパシティを上げるとどうなるか?ということもあります。減速側ではリアが先に飽和するので、リアタイヤを強化すると減速旋回での性能向上が図れるはずです。
「車両統合制御システム「S-AWC」の開発」 p.23-26
【S-AWC】ACDを強く働かせるとアンダー方向(安定方向)に行きますので、4駆のスタビリティ向上効果が出ます。しかし、トラクションは稼げるが曲がらないという背反もあります。S-AWCの制御では前後輪が同時に限界を迎える(旋回限界が最も高くなる)ようにACDの差動制限を掛けています。
AYCはヨーを出すのにも抑えるのにも使えます。制御は、舵角に対するヨーゲインを出して、これから定常の目標ヨーレートを算出しています。この定常目標ヨーレートに実ヨーレートをフィードバックし、ヨーレート差をAYCで補償するようにしています。しかし、ヨーレート差をどう演算してヨーモーメントにしているかは記述されていないので不明です。
計算されたヨーモーメントは加減速状態、旋回状態に応じて、前後差動制限制御ヨーモーメントMACD、左右トルク移動ヨーモーメントMAYC、ブレーキ制御ヨーモーメントMBRKに配分されます。制御は次のように行われます。
| 旋回促進かつ加速時 | MAYCを強める |
| 旋回促進かつ減速時 | MBRKを強める |
| 旋回抑制 | MBRKをより強めた上、MACDへの配分を行う |
旋回促進かつ減速時にブレーキを抜くことはしてなさそうですが、読み取ることは出来ません。MBRKを強めるというのに入っている(ブレーキを抜くことでMBRKが強められる)のかもしれません。
「新開発4B11型ターボエンジン」 p.27-30
【エンジン】ターボチャージャーのコンプレッサーホイール形状の最適化、吸気系のストレート化、排気系の管径拡大で、2500rpmでのブースト圧の立ち上がり時間を18%低減しています。3000rpmでは2%、4000rpmでは9%低減となっています。3000rpmはブースト圧がかなりあがりフルブーストになるまでの絶対時間が長いため、そこをもっと短く出来ると良いのですが。低回転から加速してくると、ブーストが掛かってきてフィーリング上はターボらしさを一番感じるところでもあります。

「ランサーエボリューションXのシャシ技術」 p.35-38
【シャシ】フロントサスはハブベアリングユニット大型化、ストラットを支えるアッパーインシュレーターの高剛性化、サブメンバーの徹底的な高剛性化を行っています。
リアはサブメンバーの6点結合、本体の高剛性構造、アームの支持スパン拡大、高剛性かつアライメント変化の最適化を行って、トー剛性53%UP、キャンバー剛性56%UPしています。ジオメトリ変化をリバウンドトーアウトに変更(バウンドはトーインで変わっていません)。ハブベアリングも大型化し剛性向上させています。ピロボールの使用箇所を増やしてリアダンパーの取り付け位置をナックルに変更し接地性を向上しています。
ブレーキはF18インチR17インチ、ローター外径はF:φ350mm、R:φ330mm。オプションの2ピースローターは1枚当たり1.3kgも軽量です。
リアサスはリバウンドトーアウトなので、リアのスタビリティが高まる方向にセッティングされていることがわかります。アンチリフトが利かないと、ブレーキ時にトーアウトになってしまって不安定になってしまうのが背反です。
2009年
特にランエボ関係はありません。
2010年
特にランエボ関係はありません。海外の学会などでは2009年~2010年にかけてちょっと発表がされているみたいですが、内容は未確認です。
[2010.10.28]